Loading cart contents...
Grasshopper y Robótica. Avances 2016.

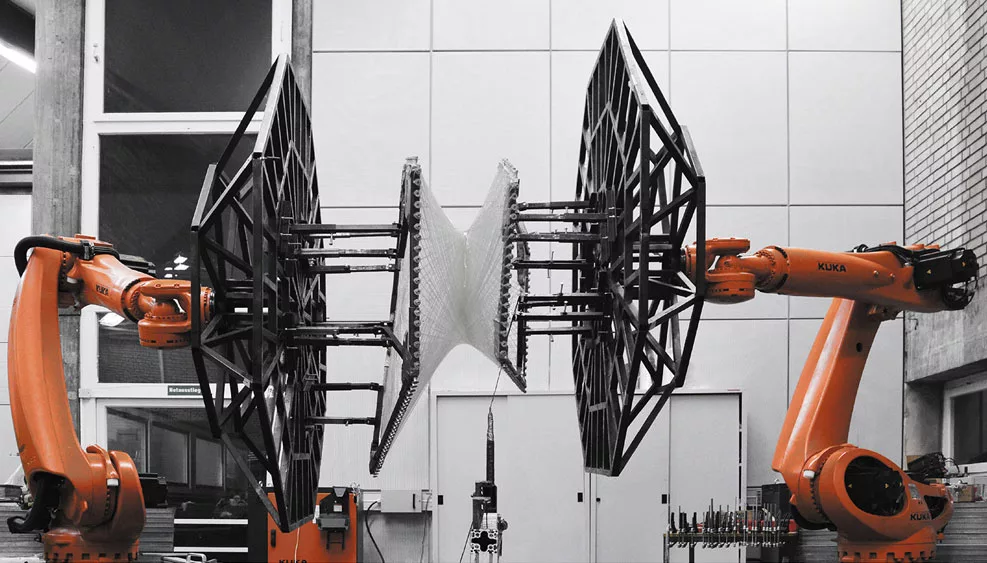
ROB| ARCH2016, se posiciona como el evento anual para mostrar los avances de la Robotica en la construcción.
ROB| ARCH2016, reunió en Sydney a investigadores de universidades e industrias vinculadas a la robótica de países como Australia, los E.E.U.U., China, Corea, Suiza, Dinamarca, Países Bajos, Austria, Portugal y España, en un evento de tres días con ocho workshops de robótica que incluyeron más de 20 robots y 30 oradores. En seis de los ocho workshops se utilizó Grasshopper:
Robot interfaz de usuario – Interfaces de usuario para robótica: Los participantes realizaron análisis de tecnologías, dispositivos de interfaz humana y seguimiento de usuarios, colocando al robot como un dispositivo mediador en un circuito de retroalimentación que involucra al mismo tiempo con el mundo físico y digital en el ahora.
Robot múltiples de conjunto: Mediante un sistema de proto-arquitectura, se ilustró la posible relación arquitectónica entre elementos estándar y no estándar dentro de un único ensamblado. Las propiedades de cada parte, considerada como una combinación de características que comparten una sola entidad, se describen y son detectadas por geométrico (punto de nube), física (masa) y los medios contextuales (denominación).
Acreción Estigmergética – deposición de polímero semiautónomo: Este taller exploró la relación entre fabricación robótica y diseño generativo con diversas herramientas como Rhino, Grasshopper, Python, estableciendo un flujo de trabajo que enlazó el control robótico en tiempo real con sistemas de visión y algoritmos de diseño generativo de múltiples agentes.

Impresión 3D interactiva: Explorando su potencial, los profesionales creativos adoptaron procesos de fabricación robótica aumentados con la introducción de sensores. Mediante una caja de herramientas de sensores útiles para la fabricación digital, los participantes en el taller construyeron e integraron aparatos de detección de un proceso de impresión 3D para explorar el papel de la regeneración material en un proceso continuo de diseño.
Laminados de coser robótico de chapa de madera personalizado: Con un enfoque alternativo se investigó el potencial arquitectónico del coser robótico de laminado de chapa de madera a medida en combinación con flexión elástica y la fabricación de herramientas de diseño computacional a medida.
Superform – Corte de lámina caliente robótica: En un taller innovador, los participantes conocieron un nuevo método de producción de encofrado doblemente curvo y colada de hormigón actualmente en desarrollo por 6 socios industriales y académicos. El método permite la producción, a escala industrial, de estructuras de hormigón doblemente curvadas utilizando una combinación de nuevo hardware, y desarrollos algorítmicos de segmentación y racionalización de la geometría.
Los temas de ROB| ARCH201: suerform, laminados robóticos, impresión 3d interactiva, acreción estimergética, interfaz de usuario
Una vez más, Grasshopper, Rhino, Python muestran su versatilidad y se imponen como las herramientas que, solas o acompañadas, ofrecen soluciones cada vez más específicas y variadas.
Fuente: www.robarch2016.org
Conoce el programa, la nueva metodología de diseño: "Co-Creación Procedural"
Clic aqui si quieres entender como generar sinergías entre algoritmos, diseñadores y empresas para crear nuevos productos y servicios que generan ingresos pasivos. ¿Te quedarás atrás?, otros ya están usando el poder de los algoritmos y co-creando con ellos. ⇱